Week of 3/17/25
- lincolndbell9
- Mar 21, 2025
- 1 min read

Updated: Mar 28, 2025
This week I moved on from my PD control tester and started taking the code that I had made and applying it to my monorail. I started by replacing the distance sensor that I was using before with an accelerometer, which measures angular data instead of distance. This meant that if I picked up the sensor and rotated it in my hand, the servo would respond and match the rotation. Then I had to scrap my old design for the balancing rig, as our 3d printers were too small to print it in one piece. Instead, I went with a lasercut design, which has 4 acrylic pieces screwed together with L-brackets. The only problem with this is that it will be harder to attach the servo motor to the gimbals where the gyroscopes sit, but I will design new holders for the motors next week.
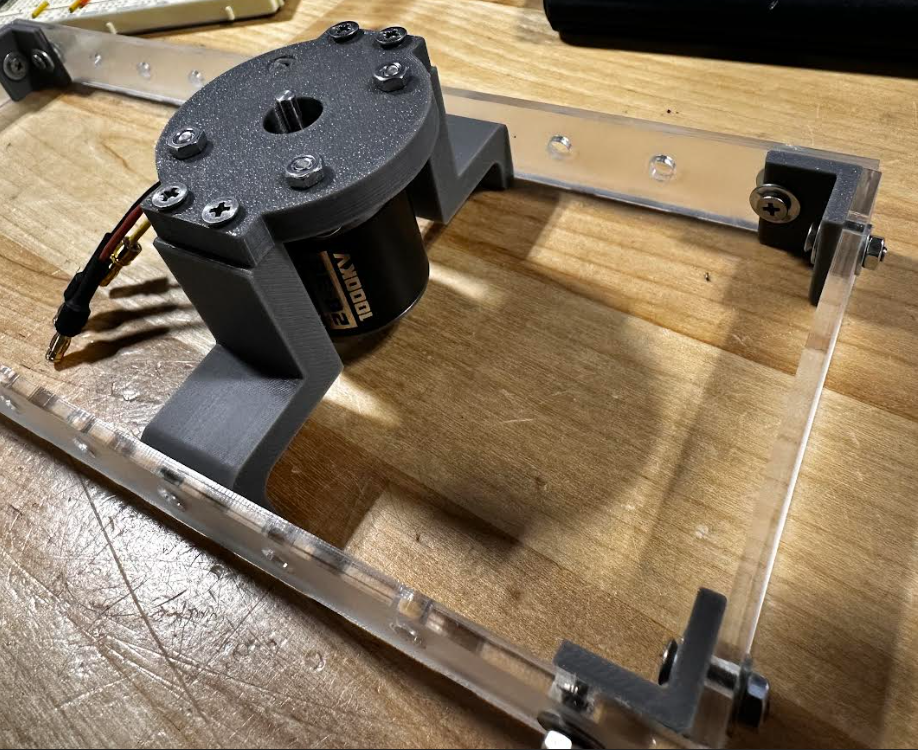

New Gimbal + Rig design(left) and the accelerometer I'm using(right)
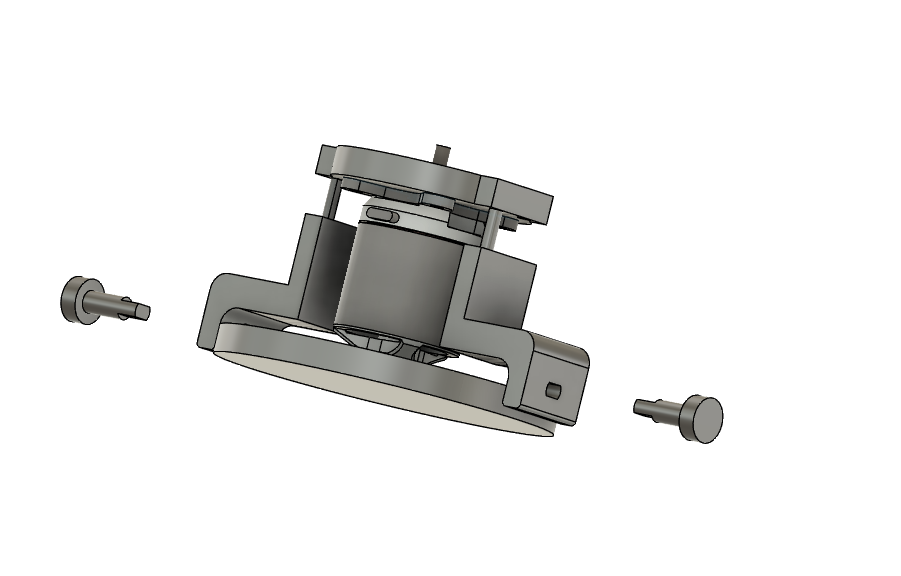
The top image is the first design of the holders, and the one beneath is a simplified version (Gimbals aren't present in the second one)


The second version is much simpler and easier to work with.
This is what the new Gimbals look like on their own. The motors will connect to the pins on either side of the gimbal,


Comments